POUR DIFFUSION IMMÉDIATE, n° 3257
Ce texte est une traduction de la version anglaise officielle de ce communiqué de presse. Il est fourni à titre de référence et pour votre confort uniquement. Pour tout détail ou spécificité, veuillez vous reporter à la version anglaise d'origine. La version anglaise d'origine prime, en cas de divergence.
Mitsubishi Electric développe une détection robuste pour la conduite autonome
Permet aux systèmes de conduite autonome et d'assistance à la conduite de fonctionner même en cas de brouillard dense ou de forte pluie
TOKYO, le 13 février 2019 - Mitsubishi Electric Corporation (TOKYO : 6503) a annoncé aujourd'hui avoir mis au point une technologie de détection très précise des périmètres des véhicules, qui fonctionne même en cas de brouillard dense ou de forte pluie. Cette technologie devrait permettre aux systèmes de conduite autonome et d'assistance à la conduite de fonctionner de manière stable même par mauvais temps, lorsque la précision de détection des capteurs traditionnels tend à se détériorer considérablement.
Freinage d'urgence autonome par mauvais temps
Les efforts de recherche et développement restent axés sur l'amélioration de la précision de détection des capteurs utilisés dans les systèmes de conduite autonome et d'assistance à la conduite. Ces systèmes s'appuient sur différents types de capteurs pour déterminer la position, la vitesse, la taille, etc., des obstacles qui se trouvent sur le parcours des véhicules. Cependant, les systèmes traditionnels basés sur ces capteurs n'ont jusqu'ici jamais obtenu de bons résultats dans des conditions de brouillard dense et de forte pluie, qui dégradent la perméabilité de l'onde laser et électrique, ainsi que la visibilité de la caméra.
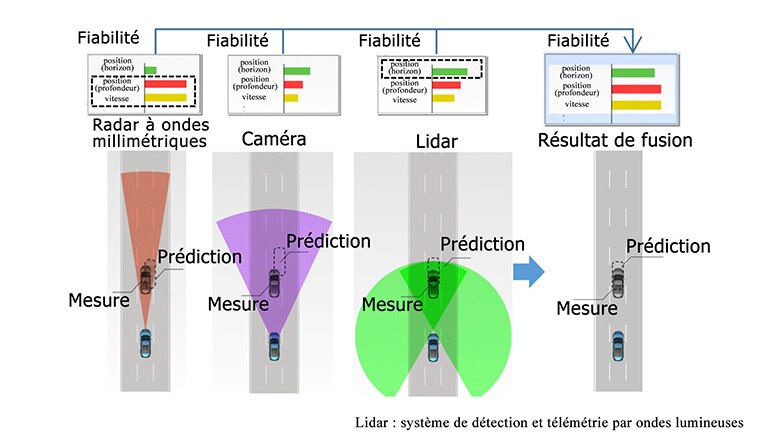
La nouvelle technologie sélectionne et intègre les informations provenant de plusieurs capteurs en fonction de la fiabilité des informations. Les données issues de séries temporelles (vitesse, largeur, orientation, distance, etc.) obtenues à partir de divers capteurs sont analysées en temps réel pour prédire la fiabilité des informations de chaque capteur affecté par les conditions météorologiques, en fonction de ses caractéristiques respectives. En sélectionnant et en intégrant des informations considérées comme très fiables, il est possible d'obtenir une détection de haute précision, même par mauvais temps. La technologie a été déployée avec un système de freinage d'urgence autonome (AEB, Autonomous Emergency Braking) lors d'essais visant à vérifier les performances de véhicules réels par mauvais temps, et il a été confirmé que le système AEB permet d'obtenir un freinage d'urgence sûr, même dans les conditions où les capteurs ne fonctionnent généralement pas de manière optimale. Prochainement, l'entreprise va effectuer des tests d'évaluation dans des environnements réels et poursuivre le développement de la technologie avec pour objectif une commercialisation dès l'année 2023. À l'avenir, l'entreprise espère pouvoir utiliser cette technologie dans des véhicules autonomes pour des changements de voie sûrs et précis, même par mauvais temps.
Résumé
| Méthode de détection | Performances | Conditions | Vitesses [km/h] |
||||
|---|---|---|---|---|---|---|---|
| Technologie développée | Sélection et intégration d'informations fiables obtenues à partir de plusieurs capteurs | Le système AEB fonctionne en conditions de brouillard dense et de forte pluie | précipitations [mm/h] |
80 | 10 à 40 | ||
| Visibilité par brouillard [m] | 15 | 10 à 15 | |||||
| Technologie traditionnelle | Sélectionner et intégrer des informations provenant de capteurs à l'aide de fonctions prédéfinies | Le système AEB n'a pas fonctionné en conditions de brouillard dense et de forte pluie | précipitations [mm/h] |
80 | n'a pas fonctionné | ||
| Visibilité par brouillard [m] | 15 | n'a pas fonctionné | |||||
Détails
- 1)
-
En sélectionnant et en intégrant des informations provenant de différents capteurs en fonction de la fiabilité des informations, il a été possible d'obtenir une détection de haute précision, même par mauvais temps
Les données issues de séries temporelles, telles que la vitesse, la largeur, l'orientation et la distance, ont été détectées à l'aide de divers capteurs, puis comparées aux informations et valeurs estimées en fonction des caractéristiques de chaque capteur. À l'aide de calculs en temps réel, la fiabilité des informations de chaque capteur affecté par les conditions météorologiques a pu être estimée. Le système a ensuite sélectionné et intégré les informations considérées comme hautement fiables. Grâce à cette technologie, il a été démontré que les systèmes de conduite autonome et d'assistance à la conduite fonctionnent normalement dans des conditions de brouillard dense et de forte pluie.
- 2)
-
Haute performance du système AEB démontrée même par mauvais temps
Les tests simulant le mauvais temps ont été effectués sur un site exploité par le Japan Automobile Research Institute, un organisme à but non lucratif. Un système AEB a été testé par forte pluie (80 mm/h de précipitations) tandis que le véhicule roulait à une vitesse maximale de 40 km/h. Il est confirmé que le système AEB a fonctionné normalement grâce à la détection d'objets, qui a déclenché un freinage d'urgence. De plus, le système a été testé en conditions de brouillard dense avec une visibilité de 15 m alors que le véhicule roulait à 10-15 km/h. Tous les tests par forte pluie ont été répétés la nuit. De plus, des tests ont été effectués alors que la précision de détection de la caméra était considérablement compromise par un rétroéclairage lorsque le véhicule roulait à une vitesse de 10 à 40 km/h. Dans toutes les conditions, le système AEB a fonctionné correctement.
- 3)
-
Fonction de prédiction environnementale
Le système lidar ne fonctionne pas bien en conditions de brouillard (l'eau en suspension dans l'air absorbe les signaux laser pulsés), c'est pourquoi l'information provenant d'un système lidar dans de telles conditions permet au système de déterminer la présence du brouillard. Les résultats de ce test seront intégrés au processus de calcul de la fiabilité pour obtenir des capacités de détection plus précises.
Veuillez noter que les communiqués sont exacts au moment de la publication, mais peuvent être sujets à modifications sans préavis.
Demande de renseignements
- Contact presse
- Public Relations Division Mitsubishi Electric Corporation(Open new window)
- Demandes de renseignements des clients
- Information Technology R&D Center Mitsubishi Electric Corporation(Open new window)