بالنسبة للنشرة الفورية رقم ٣٢٥٧
إن هذا النص ترجمة للنص الإنجليزي الرسمي لهذا الإصدار الجديد، وقد تم تزويده للرجوع إليه بسهولة عند الحاجة. يرجى الرجوع إلى النص الإنجليزي الأصلي للحصول على التفاصيل و/أو المواصفات الخاصة. في حال وجود أي تعارض، فيجب اتباع محتوى الإصدار الإنجليزي الأصلي.
شركة Mitsubishi Electric تطور تقنية استشعار قوية للقيادة الذاتية
تتيح لنظامي القيادة الذكية ودعم القيادة إمكانية العمل حتى في ظروف الضباب الكثيف أو الأمطار الغزيرة
طوكيو، ١٣ فبراير ٢٠١٩ - أعلنت شركة Mitsubishi Electric Corporation (طوكيو: ٦٥٠٣) اليوم أنها طورت تقنية استشعار تتميز بدقة عالية في اكتشاف المناطق المحيطة بالمركبات في ظروف الضباب الكثيف أو الأمطار الغزيرة. ومن المتوقع أن تتيح التقنية لنظامي القيادة الذكية ودعم القيادة إمكانية العمل بثبات حتى في الطقس القاسي، الذي غالبًا ما تتضاءل فيه دقة الكشف لدى المستشعرات التقليدية بدرجة كبيرة.
نظام الفرملة الذاتية الطارئة في الطقس القاسي
تستمر الجهود المبذولة في البحث والتطوير في التركيز على رفع مستوى دقة الكشف لدى المستشعرات المستخدمة في نظامي القيادة الذاتية ودعم القيادة. حيث يعتمد هذان النظامان على استخدام أنواع متعددة من المستشعرات للتأكد من مواضع العوائق التي تقف في طريق المركبات، وسرعاتها، وأحجامها، وغير ذلك. ومع ذلك، فإن الأنظمة التقليدية التي تستخدم هذه المستشعرات لا تقدم حتى الآن أداءً جيدًا في ظروف الضباب الكثيف أو الأمطار الغزيرة التي تقلل من قابلية نفاذ موجات الليزر والموجات الكهربائية ومدى وضوح الرؤية للكاميرا.
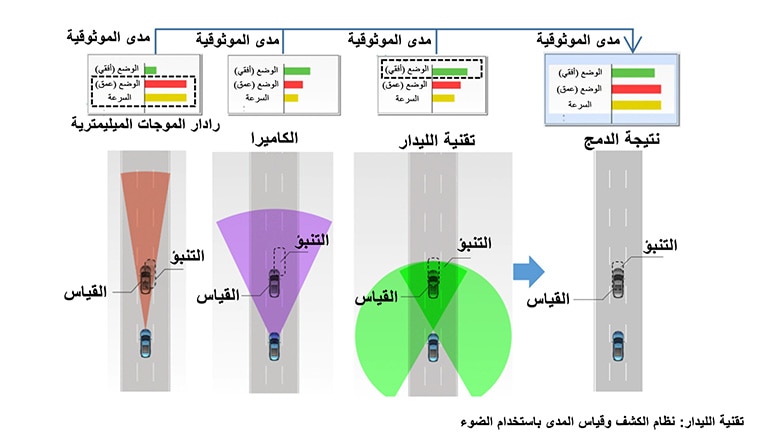
إن التقنية الجديدة تختار المعلومات من عدة مستشعرات وتعمل على دمجها حسب مدى موثوقية المعلومات. كما يتم تحليل بيانات المتسلسلة الزمنية (السرعة والعرض والاتجاه والمسافة، وغيرها) التي تم الحصول عليها من عدة مستشعرات في الوقت الفعلي للتنبؤ بمدى موثوقية المعلومات الخاصة بكل مستشعر والتي تأثرت بالطقس، وذلك بحسب الميزات الخاصة به. ومن خلال اختيار المعلومات التي ثبتت موثوقيتها العالية ودمجها، تصبح القدرة على الكشف بدقة عالية ممكنة حتى في ظروف الطقس القاسي. وقد تم تطبيق التقنية باستخدام نظام للفرملة الذاتية الطارئة (AEB) في اختبارات للتحقق من أداء المركبات الحقيقية في الطقس القاسي، وثبت أن نظام AEB يمكنه تنفيذ عملية فرملة طارئة آمنة حتى في الظروف التي لا تقدم فيها المستشعرات أداءً جيدًا في المعتاد. وبالمضي قدمًا، فإن الشركة ستعمل على إجراء اختبارات تقييم في البيئات الفعلية وستواصل تطوير التقنية بهدف تسويقها تجاريًا بداية من عام ٢٠٢٣ فصاعدًا. وتتوقع الشركة استخدام هذه التقنية في المركبات الذاتية في المستقبل للتمكن من تغيير حارات السير بأمان ودقة في الطقس القاسي.
نظرة عامة
| طريقة الكشف | الأداء | الظروف الجوية | السرعات [كم/ساعة] |
||||
|---|---|---|---|---|---|---|---|
| التقنية المطوَّرة | اختيار معلومات موثوقة تم الحصول عليها من عدة مستشعرات، ودمجها | يعمل نظام AEB في ظروف الضباب الكثيف أو الأمطار الغزيرة | هطول الأمطار [مم/ساعة] |
٨٠ | ١٠~٤٠ | ||
| مدى وضوح الرؤية في الضباب [م] | ١٥ | ١٠~١٥ | |||||
| التقنية التقليدية | اختيار معلومات من مستشعرات ودمجها باستخدام وظائف معدة مسبقًا | لم يستطع نظام AEB العمل في ظروف الضباب الكثيف أو الأمطار الغزيرة | هطول الأمطار [مم/ساعة] |
٨٠ | غير قادر على العمل | ||
| مدى وضوح الرؤية في الضباب [م] | ١٥ | غير قادر على العمل | |||||
التفاصيل
- 1)
-
تم تحقيق القدرة على الكشف بدقة عالية حتى في الطقس القاسي من خلال اختيار معلومات من عدة مستشعرات ودمجها حسب مدى موثوقية المعلومات.
لقد تم الكشف عن بيانات المتسلسلة الزمنية، مثل السرعة والعرض والاتجاه والمسافة، باستخدام عدة مستشعرات، ثم تمت مقارنتها مع المعلومات والقيم المقدَّرة حسب الميزات المتوفرة بكل مستشعر. وباستخدام الحسابات في الوقت الفعلي، تم التنبؤ بمدى موثوقية المعلومات الخاصة بكل مستشعر والتي تأثرت بالطقس. وبعد ذلك، اختار النظام المعلومات التي ثبتت موثوقيتها العالية وعمل على دمجها. وباستخدام هذه التقنية، أظهر نظاما القيادة الذاتية ودعم القيادة أداءً طبيعيًا في ظروف الضباب الكثيف أو الأمطار الغزيرة.
- 2)
-
يقدم نظام AEB أداءً عاليًا مثبتًا حتى في الطقس القاسي
تم إجراء اختبارات تحاكي الطقس القاسي في إحدى المنشآت التي يديرها معهد أبحاث السيارات غير الربحي في اليابان. حيث تم اختبار نظام AEB في ظروف الأمطار الغزيرة (بلغ معدل هطول الأمطار٨٠ مم/ساعة)، بينما بلغ أقصى حد لسرعة سير المركبة ٤٠ كم/ساعة. ولقد ثبت عمل نظام AEB بشكل طبيعي بسبب النجاح في الكشف عن الأجسام، مما أدى إلى تشغيل الفرملة الطارئة. كما تم اختبار النظام أيضًا في ظروف الضباب الكثيف الذي بلغ مدى وضوح الرؤية فيه ١٥ م، بينما سارت المركبة بسرعة ١٠-١٥ كم/ساعة. وقد تم تكرار جميع الاختبارات في ظروف الأمطار الغزيرة ليلاً. بالإضافة إلى ذلك، تم إجراء الاختبارات عندما أدت الإضاءة الخلفية إلى إضعاف مستوى دقة الكشف لدى الكاميرا بدرجة كبيرة، بينما كانت المركبة تسير بسرعة ١٠-٤٠ كم/ساعة. وفي جميع الظروف، قدم نظام AEB أداءً ناجحًا.
- 3)
-
وظيفة التنبؤ بالبيئة المحيطة
إن تقنية الليدار لا تقدم أداءً جيدًا في الضباب (حيث يمتص الماء المعلق في الهواء إشارات الليزر النبضي)، وبالتالي فإن المعلومات الصادرة من الليدار في مثل تلك الظروف تمكّن النظام من تحديد مدى وجود ضباب. وسيتم إدراج نتائج هذا الاختبار في عملية حساب مدى موثوقية المعلومات لتوفير قدرات أكثر دقة للكشف.
تجدر الإشارة إلى أن النشرات الإخبارية دقيقة في وقت نشرها لكنها قد تكون عرضة للتغيير من دون إشعار.
الاستفسارات
- جهة الاتصال الإعلامية
- قسم العلاقات العامة بشركة Mitsubishi Electric(Open new window)
- استفسارات العملاء
- مركز البحث والتطوير لتقنية المعلومات بشركة Mitsubishi Electric(Open new window)