بالنسبة للنشرة الفورية رقم ٣٠٠٣
شركة Mitsubishi Electric تطور روبوتًا لإدارة ٤٩٢ قطعة مرآة لـ Thirty Meter Telescope (تلسكوب الثلاثين مترًا) في مونا كيا
يضمن الاستبدال الدقيق والمرن والآمن لقطع المرايا
طوكيو، ١٧ فبراير ٢٠١٦ - أعلنت شركة Mitsubishi Electric (طوكيو: ٦٥٠٣) اليوم أنها قد أكملت نموذجًا أوليًا لروبوت خاص بـ segment-handling system (SHS) (نظام التعامل مع الأجزاء) المصمم لاستبدال ٤٩٢ قطعة مرآة تتكون منها المرآة الأساسية بقطر ٣٠ مترًا الخاصة بـ Thirty Meter Telescope (TMT®) (تلسكوب الثلاثين مترًا) المخطط بناؤه في مونا كيا في ولاية هاواي بالولايات المتحدة.
سيتم استخدام تلسكوب TMT لاستكشاف المجرات والنجوم الأولية في الكون، وهو مشروع تعاوني بين خمسة بلدان هي اليابان والولايات المتحدة وكندا والصين والهند. وتتكون مرآته الأساسية من ٤٩٢ قطعة مرآة سداسية الشكل، وتزن كل منها حوالي ٢٥٠ كيلو جرام. وقد عملت شركة Mitsubishi Electric على تطوير الهيكل الرئيسي لتلسكوب TMT بالإضافة إلى نظام SHS الذي سيُستخدَم لاستبدال قطع المرايا عند تدهور أسطحها المطلية بالألومنيوم. ومن المتوقع أن يساعد الروبوت بوظائفه المؤتمتة في زيادة المدة الزمنية لتلسكوب TMT المتاحة لعمليات الرصد إلى الحد الأقصى.
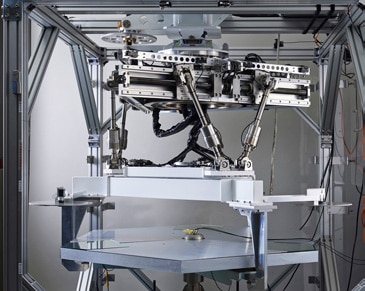
نموج أولي لروبوت نظام segment-handling system (SHS) (نظام التعامل مع الأجزاء)
تم تصميم الروبوت ليتعرف على مكانه وموضعه بالنسبة للمكان والموضع الخاصين بقطعة المرآة المستهدفة. وبالنسبة لمشكلة استشعار قطع المرايا التي تتميز بأسطح عاكسة إلى درجة مرتفعة، تم حل هذه المشكلة من خلال عرض أعلام بنمط مربعات سوداء وبيضاء على المرايا. وعملت ثلاثة مستشعرات رؤية مطورة حديثًا على تمكين الروبوت من الاقتراب بأمان من المرايا اعتمادًا على التعرف الدقيق على المكان والموضع.
أدمَج الروبوت أيضًا تقنية التحكم في القوة لتعويض حدوث أي خطأ أثناء اقترابه من إحدى المرايا. وتستخدم التقنية مستشعر قوة لاكتشاف الحمل الموجود على إحدى المرايا بدقة تبلغ أقل من كيلو جرام واحد أثناء حركة الروبوت التي تتميز بست درجات من الحرية (6DoF) (٣ درجات حرية (3DoF) من الحركة للأمام/للخلف ولأعلى/لأسفل ولليسار/لليمين، و٣ درجات حرية (3DoF) من الحركات الدورانية). تعمل كل من الأذرع الثلاث المستقلة للروبوت على الإمساك بالمرآة برفق، مما يساعد على موازنة المرآة التي تزن ٢٥٠ كيلو جرام وتعويض أي انحراف قد يحدث بسبب الوزن. ويساعد التصميم المبتكر لعمود التركيب وخوارزمية التحكم في القوة على تقليل الوقت المطلوب لاستبدال قطع المرايا بنسبة ٦٠ في المائة.
تعمل آلية الارتباط المتوازي المكونة من ستة روابط على إتاحة حركة طويلة الشوط متزامنة بطول المحور الصادي (لأعلى/لأسفل) وحركات بست درجات حرية (6DoF). وتضمن الحركة طويلة الشوط وجود مسافة مناسبة بين المرآة الرئيسية والروبوت لنقل قطعة المرآة الممسوكة بأمان.
يتضمن نظام SHS وجود جسر رئيسي يمتد أعلى المرآة الرئيسية عند استبدال قطعة مرآة. ويدور الجسر في اتجاه محيطي ويتحرك الروبوت للأمام وللخلف أسفل الجسر.
تجدر الإشارة إلى أن النشرات الإخبارية دقيقة في وقت نشرها لكنها قد تكون عرضة للتغيير من دون إشعار.
الاستفسارات
- جهة الاتصال الإعلامية
- قسم العلاقات العامة بشركة Mitsubishi Electric(Open new window)
- استفسارات العملاء
- مركز البحث والتطوير للتقنيات المتقدمة بشركة Mitsubishi Electric(Open new window)