PARA PUBLICACIÓN INMEDIATA N.º 3003
Mitsubishi Electric desarrolla un robot para gestionar 492 espejos de segmento del Telescopio de Treinta Metros de Mauna Kea
Garantizará la sustitución precisa, flexible y segura de los espejos de segmento
TOKIO, 17 de febrero de 2016 - Mitsubishi Electric Corporation (TOKIO: 6503) ha anunciado hoy que ha completado un prototipo de robot para su sistema de manipulación de segmento (SHS), diseñado para sustituir los 492 espejos de segmento que componen el espejo principal de 30 metros del Telescopio de Treinta Metros (TMT®), cuya construcción está prevista en Mauna Kea, en el estado estadounidense de Hawái.
El TMT, una colaboración entre cinco países: Japón, Estados Unidos, Canadá, China e India, se utilizará para explorar las primeras galaxias y estrellas del universo. Su espejo principal está compuesto por 492 espejos de segmento hexagonales que pesan unos 250 kilogramos cada uno. Mitsubishi Electric ha estado desarrollando la estructura principal del TMT, así como el SHS que se utilizará para sustituir los espejos de segmento a medida que se degraden sus superficies recubiertas con aluminio. Se espera que el robot, gracias a sus funciones automáticas, ayude a maximizar el tiempo durante el que el TMT estará disponible para observaciones.
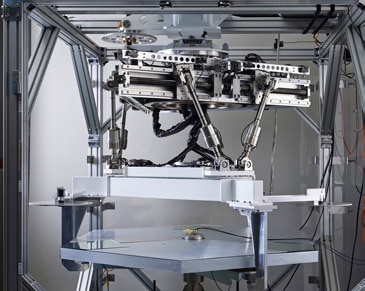
Prototipo de robot del sistema de manipulación de segmento (SHS)
El robot está diseñado para reconocer su posición y ángulo en relación a los del espejo de segmento meta. El problema de la detección de los espejos de segmento, que tienen superficies altamente reflectantes, se resolvió mediante la proyección de un patrón de bandera a cuadros sobre ellos. Tres sensores de visión desarrollados recientemente permiten que el robot enfoque los espejos de forma segura en función del reconocimiento exacto de la posición y el ángulo.
El robot también incorpora tecnología de control de potencia para compensar cualquier error durante el enfoque del espejo. La tecnología utiliza un sensor de potencia para detectar las cargas aplicadas a un espejo con una precisión de menos de un kilogramo durante los movimientos de seis grados de libertad (6DoF) del robot (adelante/atrás, arriba/abajo e izquierda/derecha 3DoF y rotaciones de cada 3DoF). Cada uno de los tres brazos independientes del robot sujeta un espejo con delicadeza, lo que ayuda a igualar los 250 kilogramos de peso del espejo y a compensar cualquier deformación causada por el peso. El diseño original del eje de instalación y del algoritmo de control de potencia ayuda a reducir el tiempo necesario para reemplazar los espejos de segmento en un 60 %.
Un mecanismo de enlaces paralelos original que consta de seis enlaces permite el movimiento de largo recorrido simultáneo a lo largo del eje Z (arriba/abajo) y los movimientos 6DoF. El movimiento de largo recorrido garantiza un espacio suficiente entre el espejo principal y el robot para transportar el espejo de segmento sujeto de forma segura.
El SHS incluye un puente principal que proyecta por encima del espejo principal cuando se sustituye un espejo de segmento. El puente gira en una dirección circular y el robot se mueve hacia adelante y hacia atrás por debajo del puente.
Tenga en cuenta que la precisión de las notas de prensa corresponde a la fecha de publicación, pero dichas notas están sujetas a modificaciones sin previo aviso.
Consulta
- Contacto de prensa
- División de relaciones públicas de Mitsubishi Electric Corporation(Open new window)
- Consultas de los clientes
- Advanced Technology R&D Center de Mitsubishi Electric Corporation(Open new window)