ZUR SOFORTIGEN VERÖFFENTLICHUNG Nr. 3003
Mitsubishi Electric entwickelt Roboter zum Managen von 492 Spiegelsegmenten des Thirty Meter Telescope (30-Meter-Teleskop) auf dem Mauna Kea
Der Roboter sorgt für den akkuraten, flexiblen und sicheren Austausch von Spiegelelementen
TOKIO, 17. Februar 2016 – Die Mitsubishi Electric Corporation (TOKIO: 6503) gab heute bekannt, dass ein Roboterprototyp für ihr Segment-Handling System (SHS, Segment-Managementsystem) fertiggestellt wurde, der die 492 Spiegelsegmente des 30-Meter-Hauptspiegels des Thirty Meter Telescope (TMT®) ersetzen kann, das auf dem Mauna Kea im US-Bundesstaat Hawaii gebaut werden soll.
Im Rahmen der Zusammenarbeit zwischen fünf Ländern – Japan, USA, Kanada, China und Indien – sollen mit dem TMT frühe Galaxien und Sterne im Universum erkundet werden. Der Hauptspiegel besteht aus 492 sechseckigen Spiegelsegmenten, von denen jedes ungefähr 250 kg wiegt. Mitsubishi Electric hat das Haupttragwerk des TMT und auch das SHS entwickelt, das eingesetzt wird, um Spiegelsegmente zu ersetzen, sobald die mit Aluminium überzogene Oberfläche abbaut. Der Roboter soll dank seiner automatisierten Funktionen helfen, die für Observationen zur Verfügung stehende Zeit des TMT zu maximieren.
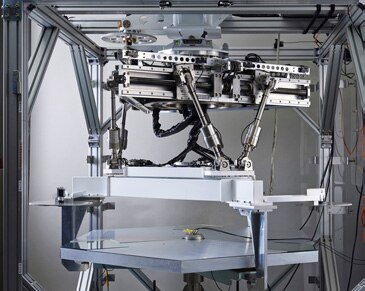
Roboterprototyp des Segment-Handling System (SHS)
Der Roboter erkennt seine relative Höhe und Position zum betreffenden Spiegelsegment. Das Problem der Wahrnehmung der Spiegel mit ihrer hochreflektiven Oberfläche wurde durch ein Karomuster gelöst, das auf sie projiziert wird. Der Roboter kann mithilfe von drei neu entwickelten Vision-Sensoren Position und Höhe korrekt erkennen und sich sicher den Spiegelsegmenten annähern.
Der Roboter ist außerdem mit Kraftregelungstechnologien ausgestattet, um mögliche Fehler bei der Annäherung an einen Spiegel zu kompensieren. Bei dieser Technologie kommt ein Kraftsensor zum Einsatz, der die Last, die während der Bewegungen des Roboters mit Six Degrees of Freedom (6DoF, 6 Freiheitsgrade, 3DoF: vorwärts/rückwärts, hoch/runter, links/rechts und 3DoF: Rotationen) auf einen Spiegel wirkt, mit einer Genauigkeit von weniger als einem Kilogramm ermittelt. Die drei unabhängigen Arme des Roboters ergreifen sanft einen Spiegel und gleichen die 250 kg Gewicht des Spiegels so aus, dass jegliche Deformation durch das Spiegelgewicht kompensiert wird. Das innovative Design mit einem Installationsschacht und dem Kraftregelungsalgorithmus trägt dazu bei, die zum Ersetzen eines Spiegelsegments erforderliche Zeit um 60 % zu verringern.
Der neuartige, aus sechs Verbindungen zusammengesetzte Parallelverbindungsmechanismus ermöglicht eine langhubige Bewegung entlang der Z-Achse (hoch/runter) bei gleichzeitigen 6DoF-Bewegungen. Langhubige Bewegungen gewährleisten ausreichenden Abstand zwischen dem Hauptspiegel und dem Roboter, damit das transportierte Spiegelsegment sicher bewegt werden kann.
Zum SHS gehört eine Hauptbrücke, die über den Hauptspiegel fährt, wenn ein Spiegelsegment ersetzt wird. Die Brücke rotiert radial, und der Roboter bewegt sich unter der Brücke vor und zurück.
Hinweis: Die Pressemitteilungen sind zum Zeitpunkt ihrer Veröffentlichung korrekt. Sie können jedoch ohne vorherige Ankündigung geändert werden.
Anfrage
- Ansprechpartner für Medien
- Public Relations Division Mitsubishi Electric Corporation(Open new window)
- Kundenanfragen
- Advanced Technology R&D Center Mitsubishi Electric Corporation(Open new window)